Technologien
Modernste Navigation
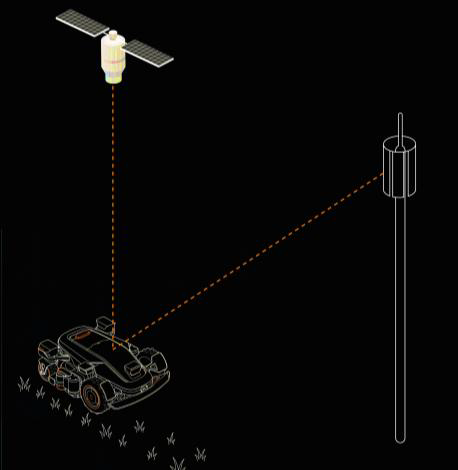
nRTK („Network Real-Time Kinematic“)
- Satelliten senden Positionssignale
- Abgleich mit GPS/4G-Netz
- Das Gerät korrigiert seine eigene Position.
nRTK = satelliten- und mobilfunknetzbasierte Navigation
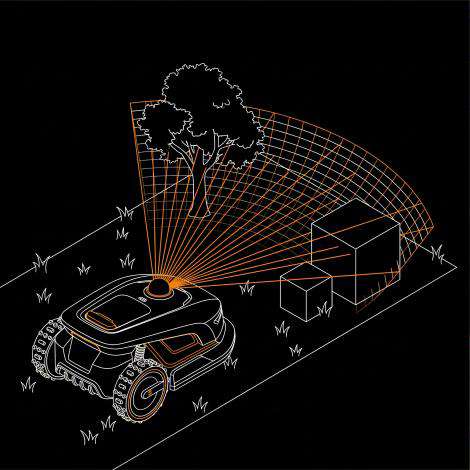
LiDAR („Light Detection and Ranging“)
- scannt die Umgebung
- erstellt eine 3D-Karte anhand von Referenzobjekten
- erweiterte Hinderniserkennung
LiDAR = 3D-räumliche Orientierung in Bereichen mit Referenzobjekten, wie z. B. Bäumen oder Gebäuden
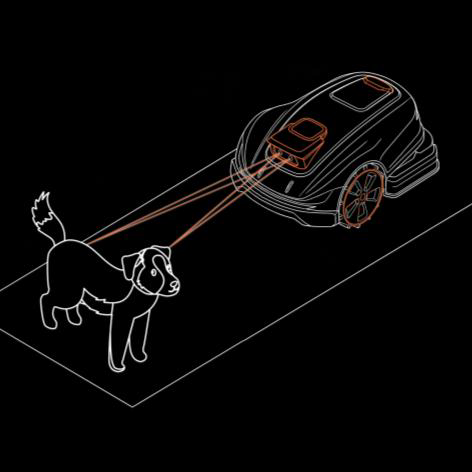
Binokular-Kamera (3D-visuelle Erfassung)
-
Zwei parallele Kameras nehmen synchron Bilder auf.
-
Aus dem Unterschied zwischen dem linken und rechten Bild wird die Tiefe berechnet.
Vision AI = am besten für deutlich sichtbare Hindernisse

iToF („Indirect Time-of-Flight“)
- misst die Phasenverschiebung zwischen Sende- und Empfangssignal
- kurze Distanz (0,2–5 m)
- gut für nahe Objekte
iToF = am besten für nahe Hindernisse

dToF („Direct Time-of-Flight“)
- misst die Laufzeit des Signals
- größere Reichweite (2–8 m)
- hohe Genauigkeit
dToF = am besten für weit entfernte Hindernisse, Genauigkeit beim Randmähen
ad AUTO DIENST Künzel
Dorfstraße 114
09306 Königshain-Wiederau
Telefon: 037202 2366
Telefax: 037202 44106
E-Mail-Adresse:
info@autodienst-kuenzel.de
Unsere Öffnungszeiten
Montag bis Freitag:
08:00 bis 18:00 Uhr
Samstag:
09:00 bis 12:00 Uhr

Aktuelles

Neu:
Sunseeker Elite Mähroboter X4
Der neue Sunseeker Elite X4 überzeugt mit moderner LiDAR Navigation. Dank intelligenter Sensorik arbeitet der Mähroboter auch dort zuverlässig, wo klassische Systeme an ihre Grenzen stoßen – selbst ohne freie Sicht zu Satelliten.
Mehr Informationen erhalten Sie hier.

Cub Cadet LT Rasentraktoren
Die Cub Cadet LT Serie mit leistungsstarken und robusten Cub Cadet Motoren erscheint neu in modernem Anthrazit und mit verbesserten Leistungsmerkmalen.
Mehr Informationen erhalten Sie hier.

DEWALT Akku-Astsäge DCMPS520
Die leistungsstarke DEWALT Akku-Astsäge DCMPS520 eignet sich ideal für die allgemeine Baumpflege. Das kompakte Design sorgt für eine bequeme Handhabung.
Mehr Informationen erhalten Sie hier.

Cub Cadet LM3 Rasenmäher
Mit dem intuitiven MySpeed-Antriebssystem folgen die Cub Cadet LM3 Rasenmäher exakt Ihrer persönlichen Schrittgeschwindigkeit – einfach den Griff packen und losgehen.
Mehr Informationen erhalten Sie hier.
Letzte Aktualisierung: 29.06.2026, 20:22 Uhr
© 2026 ad AUTO DIENST Mario Künzel